Garras, ventosas e EOAT
Desenvolvemos ferramentas de pega conforme o produto, o ciclo da máquina e o nível de precisão exigido na aplicação.
Ferramental e EOAT
Desenvolvemos garras, ventosas, manipuladores e ferramentas especiais para robôs cartesianos, robôs de 6 eixos e células de automação industrial.
Desenvolvemos ferramentas de pega conforme o produto, o ciclo da máquina e o nível de precisão exigido na aplicação.
Projetos para alimentação e retirada de máquinas, manipulação de peças e operações repetitivas com estabilidade e segurança.
Integração com sensores, sistemas de visão e dispositivos sob medida para células robotizadas com mais inteligência de processo.
Ferramental de robôs são componentes desenvolvidos para realizar alguma tarefa para o robô. O robô em si só tem como objetivos a movimentação, no qual posiciona as ferramental para executar uma tarefa, assim como um humano manipulado uma ferramenta.
Já os sistemas de análises, são sensores, câmeras e outros softwares/recursos, que orientam o robô a fazer um movimento. Os mais utilizados são os sistemas de visão, que permitem análises visuais das situações, possibilitando ao robô, reconhecer o atual cenário.
 Carregando robô...
Carregando robô...
O ferramental pode ser simples ou complexo, variando conforme a aplicação. Vamos apresentar uma ferramental intermediário como exemplo: um ferramental que possibilita a pega de componentes por vácuo ou por sistema magnético. Essa ferramenta também possui câmeras para sistema de visão, onde será realizada a orientação das coordenadas para que o robô execute a manipulação e, sensores à laser, que transferem alguns dados para o sistema. Esse ferramental é específico para robôs cartesianos.
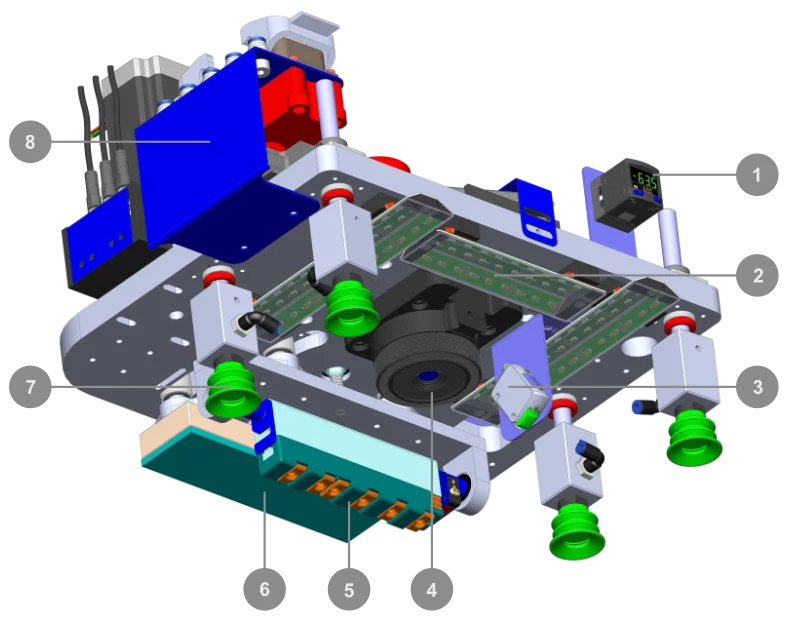
O sistema de visão é o que orienta o robô quanto à coordenada de um objeto para executar a sua pega ou definir o sentido de um movimento. No vídeo, é possível verificar a leitura da caixa e seu movimento entrando sobre a colmeia da caixa para requisitar o que há em seu interior. Trabalhamos com o desenvolvimento de softwares para análise de imagens.
O ferramental certo impacta diretamente ciclo, segurança, repetibilidade e qualidade da aplicação. Por isso, avaliamos peso, geometria, acabamento da peça, tipo de movimento e necessidade de sensores antes de definir a melhor solução.
Também podemos integrar o projeto com robôs cartesianos, robôs de 6 eixos e equipamentos especiais, formando uma solução completa de automação.
Desenvolvemos ferramental sob medida para robôs industriais e células automatizadas.